3D vector Vector defined with 3 float numbers More...
#include <mathlib.h>
Public Member Functions | |
| base_vec3 (void) | |
| base_vec3 (const base_t &_x, const base_t &_y, const base_t &_z) | |
| base_vec3 (const base_t *_v) | |
| base_vec3 (const vec2 &_v, base_t _z) | |
| base_vec3 (const base_vec3 &_v) | |
| base_vec3 (const base_vec3 *_v) | |
| base_vec3 (const base_vec3 &_v, const base_vec3 &_w) | |
| ab vector coordinates More... | |
| base_vec3 (const vec4 &_v) | |
| base_t | get_x () |
| base_t | get_y () |
| base_t | get_z () |
| bool | operator== (const base_vec3 &_v) |
| bool | operator!= (const base_vec3 &_v) |
| base_vec3 & | operator= (base_t _f) |
| const base_vec3 | operator* (base_t _f) const |
| const base_vec3 | operator/ (base_t _f) const |
| base_vec3 | operator/ (const base_vec3 &_v) const |
| const base_vec3 | operator+ (const base_vec3 &_v) const |
| const base_vec3 | operator- () const |
| const base_vec3 | operator- (const base_vec3 &_v) const |
| base_vec3 & | operator*= (base_t _f) |
| base_vec3 & | operator/= (base_t _f) |
| base_vec3 & | operator+= (const base_vec3 &_v) |
| base_vec3 & | operator-= (const base_vec3 &_v) |
| base_t | operator* (const base_vec3 &_v) const |
| base_vec3 | operator^ (const base_vec3 &_v) const |
| cross product More... | |
| base_t | operator* (const vec4 &_v) const |
| operator base_t * () | |
| operator const base_t * () const | |
| base_t & | operator[] (int _i) |
| const base_t & | operator[] (int _i) const |
| bool | barelyEqual (const base_vec3 &_v) const |
| void | set (base_t _x, base_t _y, base_t _z) |
| void | reset (void) |
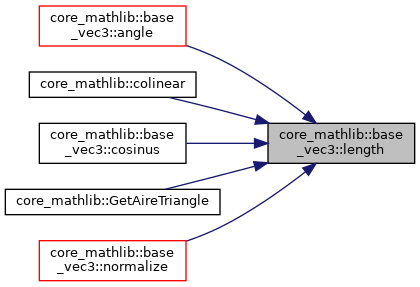
| base_t | length (void) const |
| base_t | normalize (void) |
| void | cross (const base_vec3 &v1, const base_vec3 &v2) |
| void | cross (const base_vec3 &v2) |
| base_t | cosinus (const base_vec3 &ac) |
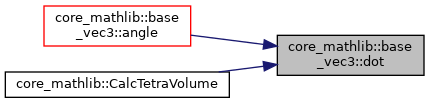
| base_t | dot (const base_vec3 &v) const |
| Scalar product. More... | |
| bool | compare (const base_vec3 &_v, base_t epsi=EPSILON_6) |
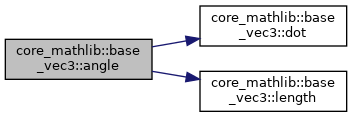
| base_t | angle (const base_vec3 &v) const |
| Return the angle in radians between *this and v. More... | |
| base_vec3 | closestPointOnLine (const base_vec3 &vA, const base_vec3 &vB) const |
| Return the coordinates of the nearest point of *this on the line passing by vA and vB. More... | |
| base_vec3 | closestPointOnSegment (const base_vec3 &vA, const base_vec3 &vB) const |
| Return the coordinates of the nearest point of *this on the segment [vA,vB]. More... | |
| base_t | projectionOnLine (const base_vec3 &vA, const base_vec3 &vB) const |
| Return the projection factor of *this on the line passing by vA and vB. More... | |
| base_vec3 | lerp (base_vec3 &u, base_vec3 &v, base_t factor) |
| Linear interpolation function between 2 vectors. More... | |
| decimal | distance (const base_vec3 &a_vector) const |
| Compute the distance between two points pointed by *this and a_vector. More... | |
| base_vec3 | Rotation (const base_vec3 &n, const base_t &angle) const |
| Vector rotation. More... | |
Public Attributes | |
| union { | |
| struct { | |
| base_t x | |
| base_t y | |
| base_t z | |
| } | |
| struct { | |
| base_t s | |
| base_t t | |
| base_t p | |
| } | |
| struct { | |
| base_t r | |
| base_t g | |
| base_t b | |
| } | |
| base_t v [3] | |
| }; | |
Detailed Description
template<typename base_t>
class core_mathlib::base_vec3< base_t >
3D vector Vector defined with 3 float numbers
Constructor & Destructor Documentation
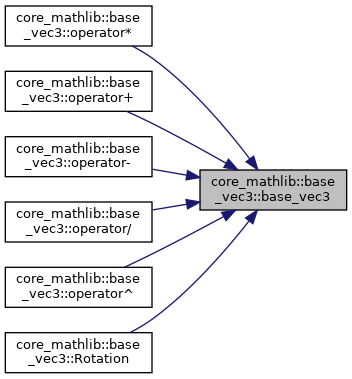
◆ base_vec3() [1/8]
template<typename base_t >
|
inline |
◆ base_vec3() [2/8]
template<typename base_t >
|
inline |
◆ base_vec3() [3/8]
template<typename base_t >
|
inline |
◆ base_vec3() [4/8]
template<typename base_t >
|
inline |
◆ base_vec3() [5/8]
template<typename base_t >
|
inline |
◆ base_vec3() [6/8]
template<typename base_t >
|
inline |
◆ base_vec3() [7/8]
template<typename base_t >
|
inline |
◆ base_vec3() [8/8]
template<typename base_t >
|
inline |
Member Function Documentation
◆ angle()
template<typename base_t >
|
inline |

◆ barelyEqual()
template<typename base_t >
|
inline |
◆ closestPointOnLine()
template<typename base_t >
|
inline |

◆ closestPointOnSegment()
template<typename base_t >
|
inline |

◆ compare()
template<typename base_t >
|
inline |
◆ cosinus()
template<typename base_t >
|
inline |

◆ cross() [1/2]
template<typename base_t >
|
inline |

◆ cross() [2/2]
template<typename base_t >
|
inline |
◆ distance()
template<typename base_t >
|
inline |
◆ dot()
template<typename base_t >
|
inline |
◆ get_x()
template<typename base_t >
|
inline |
◆ get_y()
template<typename base_t >
|
inline |
◆ get_z()
template<typename base_t >
|
inline |
◆ length()
template<typename base_t >
|
inline |
◆ lerp()
template<typename base_t >
|
inline |
◆ normalize()
template<typename base_t >
|
inline |

◆ operator base_t *()
template<typename base_t >
|
inline |
◆ operator const base_t *()
template<typename base_t >
|
inline |
◆ operator!=()
template<typename base_t >
|
inline |
◆ operator*() [1/3]
template<typename base_t >
|
inline |

◆ operator*() [2/3]
template<typename base_t >
|
inline |
◆ operator*() [3/3]
template<typename base_t >
|
inline |
◆ operator*=()
template<typename base_t >
|
inline |
◆ operator+()
template<typename base_t >
|
inline |

◆ operator+=()
template<typename base_t >
|
inline |
◆ operator-() [1/2]
template<typename base_t >
|
inline |

◆ operator-() [2/2]
template<typename base_t >
|
inline |

◆ operator-=()
template<typename base_t >
|
inline |
◆ operator/() [1/2]
template<typename base_t >
|
inline |
◆ operator/() [2/2]
template<typename base_t >
|
inline |

◆ operator/=()
template<typename base_t >
|
inline |
◆ operator=()
template<typename base_t >
|
inline |
◆ operator==()
template<typename base_t >
|
inline |
◆ operator[]() [1/2]
template<typename base_t >
|
inline |
◆ operator[]() [2/2]
template<typename base_t >
|
inline |
◆ operator^()
template<typename base_t >
|
inline |

◆ projectionOnLine()
template<typename base_t >
|
inline |
◆ reset()
template<typename base_t >
|
inline |
◆ Rotation()
template<typename base_t >
|
inline |
◆ set()
template<typename base_t >
|
inline |
Member Data Documentation
◆
| union { ... } |
◆ b
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::b |
◆ g
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::g |
◆ p
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::p |
◆ r
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::r |
◆ s
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::s |
◆ t
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::t |
◆ v
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::v[3] |
◆ x
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::x |
◆ y
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::y |
◆ z
template<typename base_t >
| base_t core_mathlib::base_vec3< base_t >::z |
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/code-tympan-fbessou/checkouts/latest/Tympan/models/common/mathlib.h