Class Geometry utilities. More...
#include <3d.h>
Static Public Member Functions | |
| static bool | intersDemiSegmentAvecSegment (const OPoint3D &ptS, const OPoint3D &ptA, const OPoint3D &ptB) |
| Return true if the horizontal from the ptS point intersects the segment defined by ptA and ptB. More... | |
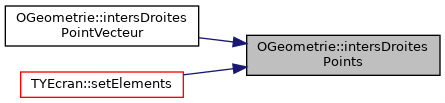
| static int | intersDroitesPoints (const OPoint3D &ptA, const OPoint3D &ptB, const OPoint3D &ptC, const OPoint3D &ptD, OPoint3D &ptI) |
| Calculate the intersection between two lines each defined by two points. More... | |
| static int | intersDroitesPointVecteur (const OPoint3D &ptA, const OVector3D &vecA, const OPoint3D &ptB, const OVector3D &vecB, OPoint3D &ptI) |
| Calculate the intersection between two lines each defined by a point and a vector. More... | |
| static double | symPointDroite (const OPoint3D &ptA, const OPoint3D &ptB, const OPoint3D &ptP, OPoint3D &ptI) |
| Calculate the symmetrical of a point with respect to a line (defined by two points). More... | |
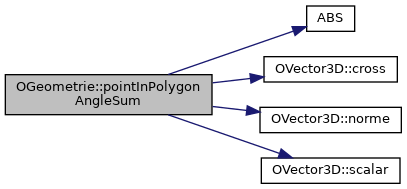
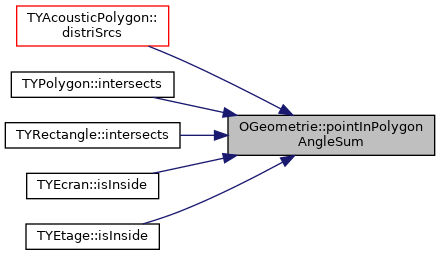
| static bool | pointInPolygonAngleSum (const OPoint3D &ptP, const OPoint3D *pts, int nbPts) |
| Tests if a point is inside a polygon using angle sum algorithm. More... | |
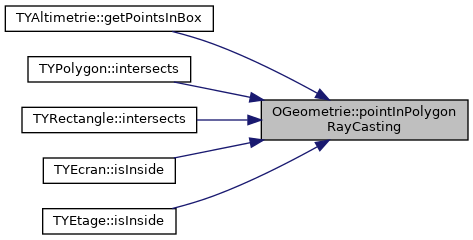
| static bool | pointInPolygonRayCasting (const OPoint3D &ptP, const OPoint3D *pts, int nbPts) |
| Tests if a point is inside a polygon using ray casting algorithm. More... | |
| static bool | shortestSegBetween2Lines (const OPoint3D &pt1, const OPoint3D &pt2, const OPoint3D &pt3, const OPoint3D &pt4, OPoint3D &ptA, OPoint3D &ptB, double *mua, double *mub) |
| Calculates the line segment PaPb that is the shortest route between two lines P1P2 and P3P4. More... | |
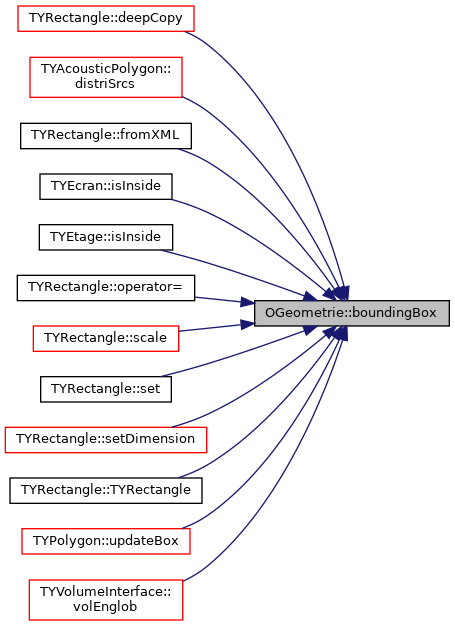
| static void | boundingBox (OPoint3D *pts, int nbPts, OPoint3D &ptMin, OPoint3D &ptMax) |
| Computes the simple bounding box for a volume using min-max method. More... | |
| static void | computeNormal (OPoint3D *pts, int nbPts, OVector3D &normal) |
| Computes the normal of the list of points. More... | |
Detailed Description
Member Function Documentation
◆ boundingBox()
|
static |
Computes the simple bounding box for a volume using min-max method.
- Parameters
-
pts An array of points defining the volume. nbPts The size of the previous array. ptMin The point with minimal values in X, Y and Z. ptMax The point with maximal values in X, Y and Z.
Definition at line 1109 of file 3d.cpp.
◆ computeNormal()


◆ intersDemiSegmentAvecSegment()
|
static |
Return true if the horizontal from the ptS point intersects the segment defined by ptA and ptB.
- Parameters
-
ptS The point of the half segment. ptA The first point of the segment. ptB The second point of the segment.
- Returns
- true if intersection exists, false if not.
Definition at line 915 of file 3d.cpp.

◆ intersDroitesPoints()
|
static |
Calculate the intersection between two lines each defined by two points.
- Parameters
-
ptA A point of the first line. ptB A second point of the first line. ptC A point of the second line. ptD A second point of the second line. ptI The intersection point.
- Returns
- INTERS_OUI (1) if intersection exists, INTERS_NULLE (0) if not.
Definition at line 938 of file 3d.cpp.

◆ intersDroitesPointVecteur()
|
static |
Calculate the intersection between two lines each defined by a point and a vector.
- Parameters
-
ptA Point of the first line. vecA Vector for the first line. ptB Point of the second line. vecB Vector for the second line. ptI The intersection point.
- Returns
- INTERS_OUI (1) if intersection exists, INTERS_NULLE (0) if not.
Definition at line 977 of file 3d.cpp.

◆ pointInPolygonAngleSum()
|
static |
Tests if a point is inside a polygon using angle sum algorithm.
This solution was motivated by solution which consists to compute the sum of the angles made between the test point and each pair of points making up the polygon and correspondence with Reinier van Vliet and Remco Lam. If this sum is 2pi then the point is an interior point, if 0 then the point is an exterior point. To determine whether a point is on the interior of a convex polygon in 3D one might be tempted to first determine whether the point is on the plane, then determine it's interior status. Both of these can be accomplished at once by computing the sum of the angles between the test point (ptP) and every pair of edge points pts[i]->pts[i+1]. This sum will only be 2pi if both the point is on the plane of the polygon AND on the interior. The angle sum will tend to 0 the further away from the polygon point ptP becomes.
- Parameters
-
ptP The point. pts An array containing the polygon points. nbPts The size of the previous array (size should be >= 3).
- Returns
trueif the point is inside the polygon,falseotherwise.
Definition at line 1016 of file 3d.cpp.
◆ pointInPolygonRayCasting()
|
static |
Tests if a point is inside a polygon using ray casting algorithm.
- Parameters
-
ptP The point. pts An array containing the polygon points. nbPts The size of the previous array (size should be >= 3).
- Returns
trueif the point is inside the polygon,falseotherwise.
Definition at line 1046 of file 3d.cpp.

◆ shortestSegBetween2Lines()
|
static |
Calculates the line segment PaPb that is the shortest route between two lines P1P2 and P3P4.
Calculates also the values of mua and mub where: Pa = P1 + mua (P2 - P1) Pb = P3 + mub (P4 - P3)
Remark: The values of mua and mub range from negative to positive infinity. The line segments between P1 P2 and P3 P4 have their corresponding mu between 0 and 1.
- Parameters
-
pt1 A 1st point on the 1st line. pt2 A 2nd point on the 1st line. pt3 A 1st point on the 2nd line. pt4 A 2nd point on the 2nd line. ptA The 1st point of the resulting segment. ptB The 2nd point of the resulting segment. mua The mua value result. mub The mub value result.
- Returns
falseif no solution exists,trueotherwise.
Definition at line 1063 of file 3d.cpp.


◆ symPointDroite()
|
static |
Calculate the symmetrical of a point with respect to a line (defined by two points).
- Parameters
-
ptA A point of the first line. ptB A second point of the first line. ptP The point we want the symmetrical ptI The symmetrical point.
- Returns
- The k coefficient (between 0 and 1 if the segment [ptP ptI] intersects the segment [ptA ptB]).
Definition at line 987 of file 3d.cpp.

The documentation for this class was generated from the following files: