|
| | OVector3D () |
| | Default constructor. More...
|
| |
| | OVector3D (const OVector3D &vector) |
| | Copy constructor. More...
|
| |
| | OVector3D (const OCoord3D &coord) |
| | Constructs a new vector from a 3D coordinate. Works like the copy constructor. More...
|
| |
| | OVector3D (const OCoord3D &coordFrom, const OCoord3D &coordTo) |
| | Constructs a new vector from 2 coordinates. More...
|
| |
| | OVector3D (double x, double y, double z) |
| | Constructs a new vector from 3 doubles. More...
|
| |
| virtual | ~OVector3D () |
| | Destructor. More...
|
| |
| void | reset () |
| | Reset this vector. More...
|
| |
| OVector3D & | operator= (const OVector3D &vector) |
| | operators More...
|
| |
| bool | operator== (const OVector3D &vector) const |
| |
| bool | operator!= (const OVector3D &vector) const |
| |
| OVector3D | operator+ (const OVector3D &vector) const |
| |
| OVector3D | operator- (const OVector3D &vector) const |
| |
| OVector3D | operator* (const OVector3D &vector) const |
| |
| OVector3D | operator* (const double a) const |
| | Multiplication with a scalar (commutative). More...
|
| |
| double | dot (const OVector3D &v) |
| | dot product (assuming an orthonormal reference frame) More...
|
| |
| OVector3D | cross (const OVector3D &vector) const |
| | Cross product. More...
|
| |
| void | balance (double c1, const OVector3D &vector2, double c2) |
| | Balances this vector. More...
|
| |
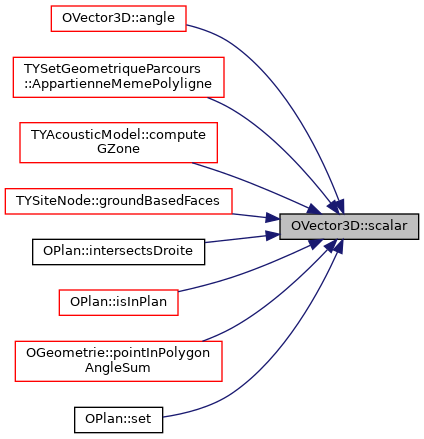
| double | scalar (const OVector3D &vector) const |
| | Performs the scalar product between this object and another vector. More...
|
| |
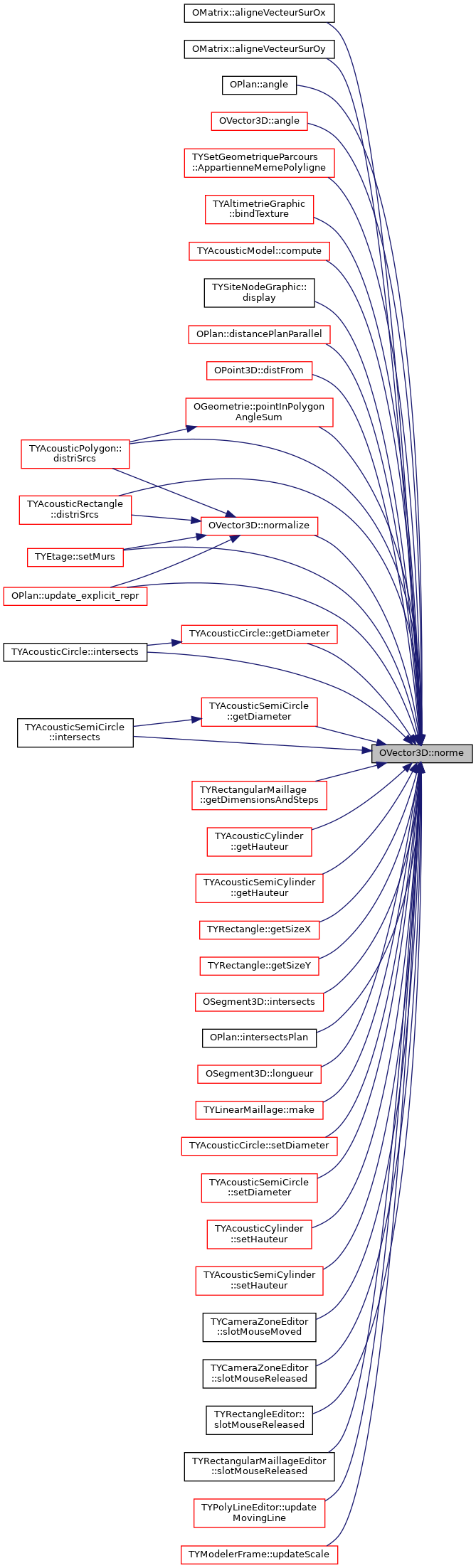
| double | norme () const |
| | Computes the length of this vector. More...
|
| |
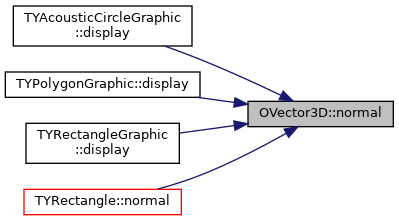
| OVector3D | normal (const OVector3D &vector2, const OVector3D &vector3) const |
| | Computes the normal with this vector and 2 others. More...
|
| |
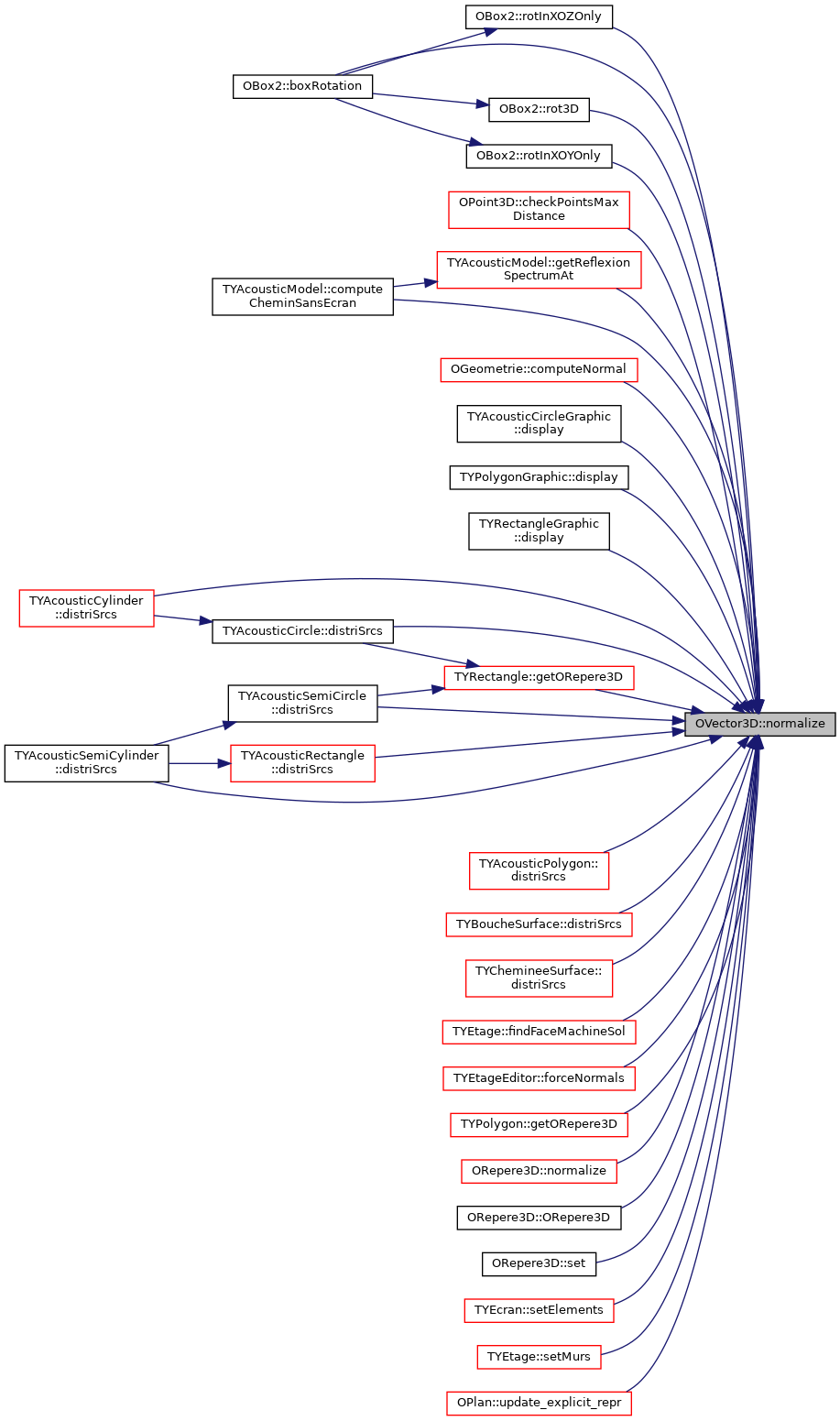
| void | normalize () |
| | Normalizes this vector. More...
|
| |
| void | invert () |
| | Inverts this vector. More...
|
| |
| double | angle (const OVector3D &vector) const |
| | Computes the angle between this vector and another vector. More...
|
| |
| OVector3D | getRotationOz (double alpha) |
| | Returns the vector after a rotation around z axis \ x -> xprime. Both of these vectors will be given in the \ original base. More...
|
| |
| OVector3D | getRotationOzBase2 (double alpha) |
| | Returns the vector after a rotation around z axis \ and gives back the coordinates of xprime or yprime in the \ new basis Bprime. More...
|
| |
| OVector3D | getRotationOy (double alpha) |
| | Returns the vector after a rotation around z axis. More...
|
| |
| OVector3D | getRotationOyBase2 (double alpha) |
| | Returns the vector after a rotation around y axis \ and gives back the coordinates of xprime or zprime in the \ new basis Bprime. More...
|
| |
| OVector3D | getRotationOzOy (double alpha, double theta) |
| | Returns the vector after 2 rotations around z axis and y axis. It gives the coordinates of xsecond, ysecond and zsecond in the first basis B. More...
|
| |
| | OCoord3D () |
| | Default constructor. More...
|
| |
| | OCoord3D (const OCoord3D &coord) |
| | Copy constructor. More...
|
| |
| | OCoord3D (double x, double y, double z) |
| | Constructor with 3D point coordinates. More...
|
| |
| virtual | ~OCoord3D () |
| | Destructor. More...
|
| |
| OCoord3D & | operator= (const OCoord3D &coord) |
| | operator= More...
|
| |
| bool | operator== (const OCoord3D &coord) const |
| | operator== More...
|
| |
| bool | operator!= (const OCoord3D &coord) const |
| | operator!= More...
|
| |
| void | setCoords (double x, double y, double z) |
| | Sets the coordinates as an array of double. More...
|
| |
| void | setCoords (double coords[3]) |
| | Sets the coordinates as an array of double. More...
|
| |
| void | getCoords (double coords[3]) |
| | Gets the coordinates as an array of double. More...
|
| |
| double * | getCoords () |
| | Gets the coordinates as an array of double. More...
|
| |
| | operator const double * () const |
| |
| | operator double * () |
| |
The 3D vector class.
Definition at line 297 of file 3d.h.
 Public Member Functions inherited from OCoord3D
Public Member Functions inherited from OCoord3D