Class to define a segment.
More...
#include <3d.h>
Class to define a segment.
Definition at line 1088 of file 3d.h.
◆ OSegment3D() [1/3]
| OSegment3D::OSegment3D |
( |
| ) |
|
Default constructor.
Definition at line 1179 of file 3d.cpp.
◆ OSegment3D() [2/3]
| OSegment3D::OSegment3D |
( |
const OSegment3D & |
other | ) |
|
Copy constructor.
Definition at line 1189 of file 3d.cpp.
◆ OSegment3D() [3/3]
◆ ~OSegment3D()
| OSegment3D::~OSegment3D |
( |
| ) |
|
|
virtual |
Destructor.
Definition at line 1200 of file 3d.cpp.
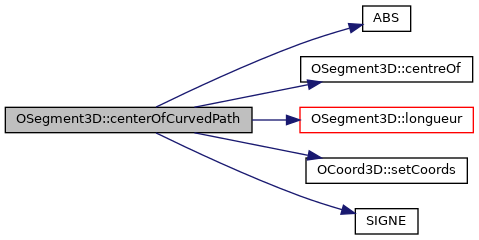
◆ centerOfCurvedPath()
| OPoint3D OSegment3D::centerOfCurvedPath |
( |
const double & |
R | ) |
const |
|
virtual |
Return the position of the arc circle center of radius R passing by the segment extremities.
- Returns
- OPoint3D Position of the arc circle center.
Definition at line 1303 of file 3d.cpp.
◆ centreOf()
Return the position of the segment middle.
- Returns
- OPoint3D
Definition at line 1294 of file 3d.cpp.
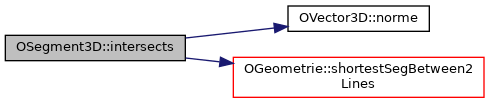
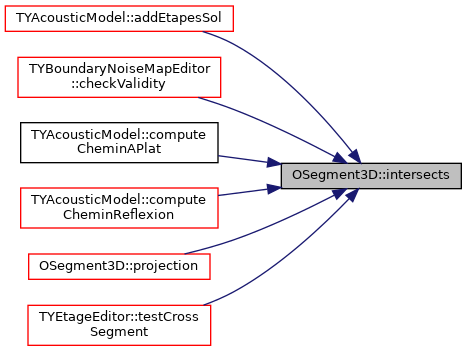
◆ intersects()
| int OSegment3D::intersects |
( |
const OSegment3D & |
seg, |
|
|
OPoint3D & |
pt, |
|
|
double |
seuilConfondus |
|
) |
| const |
|
virtual |
Return the intersection point with another segment.
- Parameters
-
| seg | Another segment. |
| pt | The intersection point. |
| seuilConfondus | Minimal distance between a point and a segment for which they are considered as overlaid |
- Returns
- INTERS_OUI (1) if the intersection exists, INTERS_CONFONDU (2) if the elements are overlaid, INTERS_NULLE (0) if there is no intersection.
Definition at line 1267 of file 3d.cpp.
◆ lengthOfCurvedPath()
| double OSegment3D::lengthOfCurvedPath |
( |
const double & |
R | ) |
|
|
virtual |
Calculate the path length of radius R passing by the segment extremities.
- Parameters
-
- Returns
- length of curved path
Definition at line 1327 of file 3d.cpp.
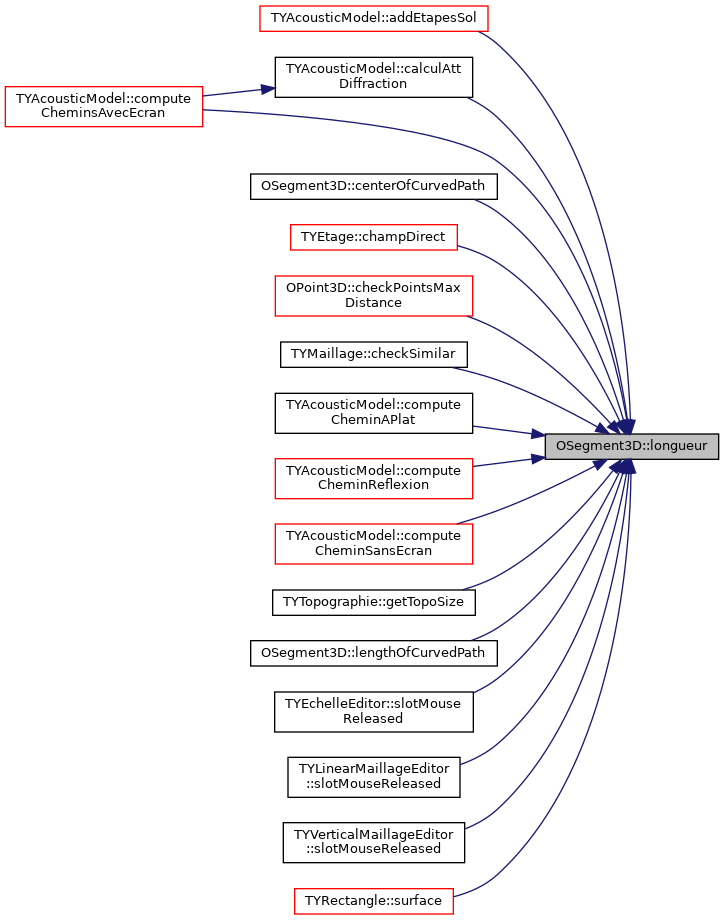
◆ longueur()
| double OSegment3D::longueur |
( |
| ) |
const |
|
virtual |
Return the segment length.
Definition at line 1238 of file 3d.cpp.
◆ operator!=()
| bool OSegment3D::operator!= |
( |
const OSegment3D & |
other | ) |
const |
|
virtual |
operator!=
Definition at line 1228 of file 3d.cpp.
◆ operator*()
Multiplication with a matrix.
- Parameters
-
| matrix | The matrix to apply to the segment points. |
- Returns
- A copy of this transformed segment.
Definition at line 1233 of file 3d.cpp.
◆ operator=()
◆ operator==()
| bool OSegment3D::operator== |
( |
const OSegment3D & |
other | ) |
const |
|
virtual |
operator==
Definition at line 1212 of file 3d.cpp.
◆ projection()
| int OSegment3D::projection |
( |
const OPoint3D & |
pt, |
|
|
OPoint3D & |
ptProj, |
|
|
double |
seuilConfondus |
|
) |
| const |
|
virtual |
Return the projection of a point.
- Parameters
-
| pt | The point we want the projection. |
| ptProj | The projected point. |
| seuilConfondus | Minimal distance between the point and the segment for which they are considered as overlaid |
- Returns
- 1 if the calculation succeeds, 0 if not.
Definition at line 1258 of file 3d.cpp.
◆ swap()
Return the segment.
Definition at line 1336 of file 3d.cpp.
◆ symetrieOf()
Return the symmetrical of a point.
- Parameters
-
| pt | The point we want the symmetrical. |
| ptSym | The symmetrical point. |
- Returns
- 1 if the calculation succeeds, 0 if not.
Definition at line 1243 of file 3d.cpp.
◆ toVector3D()
Build a OVector3D from a segment used for the direction of the sources.
- Returns
- A reference to a OVector3D
Definition at line 1188 of file 3d.h.
◆ _ptA
Point A of the segment.
Definition at line 1201 of file 3d.h.
◆ _ptB
Point B of the segment.
Definition at line 1203 of file 3d.h.
The documentation for this class was generated from the following files:
- /home/docs/checkouts/readthedocs.org/user_builds/code-tympan-fbessou/checkouts/latest/Tympan/models/common/3d.h
- /home/docs/checkouts/readthedocs.org/user_builds/code-tympan-fbessou/checkouts/latest/Tympan/models/common/3d.cpp