Plan defined by its equation : ax+by+cz+d=0. More...
#include <plan.h>
Public Member Functions | |
| OPlan () | |
| Default constructor With a=b=c=d=0. More... | |
| OPlan (const OPlan &plan) | |
| Copy constructor. More... | |
| OPlan (double a, double b, double c, double d) | |
| Constructor with the a, b, c and d parameters. More... | |
| OPlan (const OPoint3D &pt1, const OPoint3D &pt2, const OPoint3D &pt3) | |
| Constructs a new plan from 3 points. More... | |
| OPlan (const OPoint3D &pt, const OVector3D &normale) | |
| Constructs a new plan from 1 point and a normal. More... | |
| virtual | ~OPlan () |
| Destructor. More... | |
| OPlan & | operator= (const OPlan &plan) |
| Assignment operator. More... | |
| bool | operator== (const OPlan &plan) const |
| The equality operator. More... | |
| bool | operator!= (const OPlan &plan) const |
| The inequality operator. More... | |
| void | set (double a, double b, double c, double d) |
| Sets a, b, c and d parameters directly. More... | |
| void | set (const OPoint3D &pt1, const OPoint3D &pt2, const OPoint3D &pt3) |
| Sets with 3 points. More... | |
| void | set (const OPoint3D &pt, const OVector3D &normale) |
| Sets with 1 point and a normal. More... | |
| int | intersectsSegment (const OPoint3D &pt1, const OPoint3D &pt2, OPoint3D &ptIntersec) const |
| Calculate the intersection of this plane with a segment defined by two points. More... | |
| int | intersectsDroite (const OPoint3D &pt, const OVector3D &vector, OPoint3D &ptIntersec) |
| Calculate the intersection of this plane with a line defined by a point and a vector. More... | |
| int | intersectsPlan (const OPlan &plan, OVector3D &vectorIntersec) |
| Calculate the intersection of this plane with another plane. More... | |
| int | intersectsSurface (const TabPoint3D &contour, OSegment3D &segment) const |
| Compute intersection between a plan and a surface defined by his bounds. More... | |
| bool | isInPlan (const OPoint3D &pt) |
| Check if a point belongs to a plane. More... | |
| bool | is_valid () |
| Check whether the plane is valid. More... | |
| bool | is_null () |
| bool | is_NaN () |
| double | angle (const OPlan &plan) |
| Calculation of the angle between this plane and another plane. More... | |
| double | distance (const OPoint3D &pt) |
| Calculation of the minimal distance between a point and this plane. More... | |
| OPoint3D | symPtPlan (const OPoint3D &pt) |
| Calculate the symmetrical of a point relative to the plane. More... | |
| OPoint3D | projPtPlan (const OPoint3D &pt) |
| Calculate the projection of a point on the plane. More... | |
| bool | distancePlanParallel (const OPlan &plan, double &distance) |
| Calculate the distance between this plan and another parallel plane. More... | |
| bool | isParallel (const OPlan &plan) |
| Check if this plane is parallel with another plane. More... | |
| bool | isOrthogonal (const OPlan &plan) |
| Check if this plan is perpendicular to another plan. More... | |
Public Attributes | |
| double | _a |
| The a parameter in the equation ax+by+cz+d=0. More... | |
| double | _b |
| The b parameter in the equation ax+by+cz+d=0. More... | |
| double | _c |
| The c parameter in the equation ax+by+cz+d=0. More... | |
| double | _d |
| The d parameter in the equation ax+by+cz+d=0. More... | |
| ORepere3D | rframe |
Protected Member Functions | |
| void | update_explicit_repr (OVector3D hint=OVector3D(1, 1, 1)) |
| updates the implicit representation of the plane More... | |
Detailed Description
Constructor & Destructor Documentation
◆ OPlan() [1/5]
◆ OPlan() [2/5]
| OPlan::OPlan | ( | const OPlan & | plan | ) |

◆ OPlan() [3/5]
| OPlan::OPlan | ( | double | a, |
| double | b, | ||
| double | c, | ||
| double | d | ||
| ) |
Constructor with the a, b, c and d parameters.
- Parameters
-
a The a parameter in the equation ax+by+cz+d=0. b The b parameter in the equation ax+by+cz+d=0. c The c parameter in the equation ax+by+cz+d=0. d The d parameter in the equation ax+by+cz+d=0.
Definition at line 36 of file plan.cpp.

◆ OPlan() [4/5]
Constructs a new plan from 3 points.
- We calculate normal vector N to the plane.
- All plan vectors are normal to N ! => Scalar product P1P.N = 0 Nx*(Px-P1x) + Ny*(Py-P1y) + Nz*(Pz-P1z) = 0 Can be written as : a*Px + b*Py + c*Pz + d = 0 == Plane equation
- Parameters
-
pt1 Point 1. pt2 Point 2. pt3 Point 3.
Definition at line 41 of file plan.cpp.

◆ OPlan() [5/5]
Constructs a new plan from 1 point and a normal.
All plan vectors are normal to N ! => Scalar product P1P.N = 0 Nx*(Px-P1x) + Ny*(Py-P1y) + Nz*(Pz-P1z) = 0 Can be written as : a*Px + b*Py + c*Pz + d = 0 == Equation du plan
- Parameters
-
pt The point. normale The normal.
Definition at line 46 of file plan.cpp.

◆ ~OPlan()
Member Function Documentation
◆ angle()
| double OPlan::angle | ( | const OPlan & | plan | ) |

◆ distance()
| double OPlan::distance | ( | const OPoint3D & | pt | ) |

◆ distancePlanParallel()
| bool OPlan::distancePlanParallel | ( | const OPlan & | plan, |
| double & | distance | ||
| ) |
Calculate the distance between this plan and another parallel plane.
- Parameters
-
plan Another plane. distance The distance between 2 planes if they are parallel.
- Returns
trueif the two planes are parallel;falseif not.
Definition at line 410 of file plan.cpp.

◆ intersectsDroite()
| int OPlan::intersectsDroite | ( | const OPoint3D & | pt, |
| const OVector3D & | vector, | ||
| OPoint3D & | ptIntersec | ||
| ) |
Calculate the intersection of this plane with a line defined by a point and a vector.
- Parameters
-
pt A point belonging to the line. vector A vector defining the line. ptIntersec The intersection point.
- Returns
- INTERS_OUI (1) if the intersection exists, INTERS_CONFONDU (2) if the elements are overlaid, INTERS_NULLE (0) if no intersection exists.
Definition at line 251 of file plan.cpp.
◆ intersectsPlan()
Calculate the intersection of this plane with another plane.
- Parameters
-
plan An another plane. vectorIntersec The vector defining the intersection.
- Returns
- INTERS_OUI (1) if the intersection exists, INTERS_CONFONDU (2) if the elements are overlaid, INTERS_NULLE (0) if no intersection exists.
Definition at line 275 of file plan.cpp.
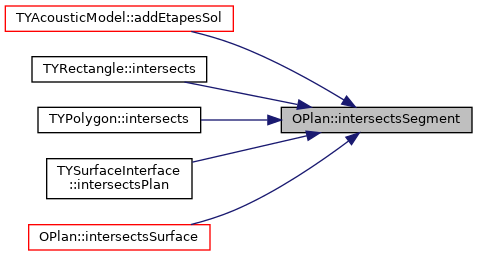
◆ intersectsSegment()
| int OPlan::intersectsSegment | ( | const OPoint3D & | pt1, |
| const OPoint3D & | pt2, | ||
| OPoint3D & | ptIntersec | ||
| ) | const |
Calculate the intersection of this plane with a segment defined by two points.
Note : In case the segment belongs to the plane, the result is INTERS_CONFONDU, and the coordinates of the intersection are not updated.
Algorithm :
- The plane is defined by : . a*x+b*y+c*z+d=0
- The segment is defined by : . x=x1+t*(x2-x1) . y=y1+t*(y2-y1) . z=z1+t*(z2-z1) . with 0 <= t <= 1
- We solve the system : . t = -(a*x1+b*y1+c*z1+d)/D . with D = a*(x2-x1)+b*(y2-y1)+c*(z2-z1) . and D = scalar product between the plane normal and . the segment vector, so if D is zero, then . the segment is parallel to the plane and we test . if a point of the segment belongs to the plane to . confirm that the segment belongs to the plane or not...
- Parameters
-
pt1 The segment first point. pt2 The segment second point. ptIntersec The intersection point.
- Returns
- INTERS_OUI (1) if the intersection exists, INTERS_CONFONDU (2) if the elements are overlaid, INTERS_NULLE (0) if no intersection exists.
Definition at line 141 of file plan.cpp.

◆ intersectsSurface()
| int OPlan::intersectsSurface | ( | const TabPoint3D & | contour, |
| OSegment3D & | segment | ||
| ) | const |


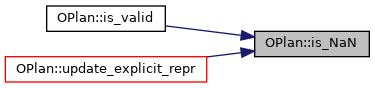
◆ is_NaN()
| bool OPlan::is_NaN | ( | ) |
◆ is_null()
| bool OPlan::is_null | ( | ) |
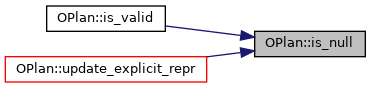
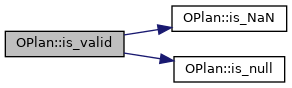
◆ is_valid()
| bool OPlan::is_valid | ( | ) |
Check whether the plane is valid.
a OPlan object can be invalid, i.e. not actually represent a plane, in case two cases :
- the normal vector (
_a,_b,_c) is null. This is the case when a OPlan is default constructed. - the normal vector, the origin, ... has not component which is NaN This can happen when points with NaN component are used.
Definition at line 133 of file plan.cpp.
◆ isInPlan()
| bool OPlan::isInPlan | ( | const OPoint3D & | pt | ) |

◆ isOrthogonal()
| bool OPlan::isOrthogonal | ( | const OPlan & | plan | ) |

◆ isParallel()
| bool OPlan::isParallel | ( | const OPlan & | plan | ) |


◆ operator!=()
| bool OPlan::operator!= | ( | const OPlan & | plan | ) | const |

◆ operator=()
◆ operator==()
| bool OPlan::operator== | ( | const OPlan & | plan | ) | const |

◆ projPtPlan()
◆ set() [1/3]
Sets with 1 point and a normal.
- We calculate normal vector N to the plane.
- All plan vectors are normal to N ! => Scalar product P1P.N = 0 Nx*(Px-P1x) + Ny*(Py-P1y) + Nz*(Pz-P1z) = 0 Can be written as : a*Px + b*Py + c*Pz + d = 0 == Plane equation
- Parameters
-
pt The point. normale The normal.
Definition at line 113 of file plan.cpp.
◆ set() [2/3]
Sets with 3 points.
- We calculate normal vector N to the plane.
- All plan vectors are normal to N ! => Scalar product P1P.N = 0 Nx*(Px-P1x) + Ny*(Py-P1y) + Nz*(Pz-P1z) = 0 Can be written as : a*Px + b*Py + c*Pz + d = 0 == Plane equation
- Parameters
-
pt1 Point 1. pt2 Point 2. pt3 Point 3.
Definition at line 103 of file plan.cpp.

◆ set() [3/3]
| void OPlan::set | ( | double | a, |
| double | b, | ||
| double | c, | ||
| double | d | ||
| ) |
Sets a, b, c and d parameters directly.
- Parameters
-
a The a parameter in the equation ax+by+cz+d=0. b The b parameter in the equation ax+by+cz+d=0. c The c parameter in the equation ax+by+cz+d=0. d The d parameter in the equation ax+by+cz+d=0.
Definition at line 94 of file plan.cpp.

◆ symPtPlan()
◆ update_explicit_repr()
updates the implicit representation of the plane
We derive a reference frame for the plane (vector u and v) from the implicit equation which is the primary representation of the plane.
Definition at line 446 of file plan.cpp.
Member Data Documentation
◆ _a
| double OPlan::_a |
◆ _b
| double OPlan::_b |
◆ _c
| double OPlan::_c |
◆ _d
| double OPlan::_d |
◆ rframe
The documentation for this class was generated from the following files: